Chain of Thought Reasoning
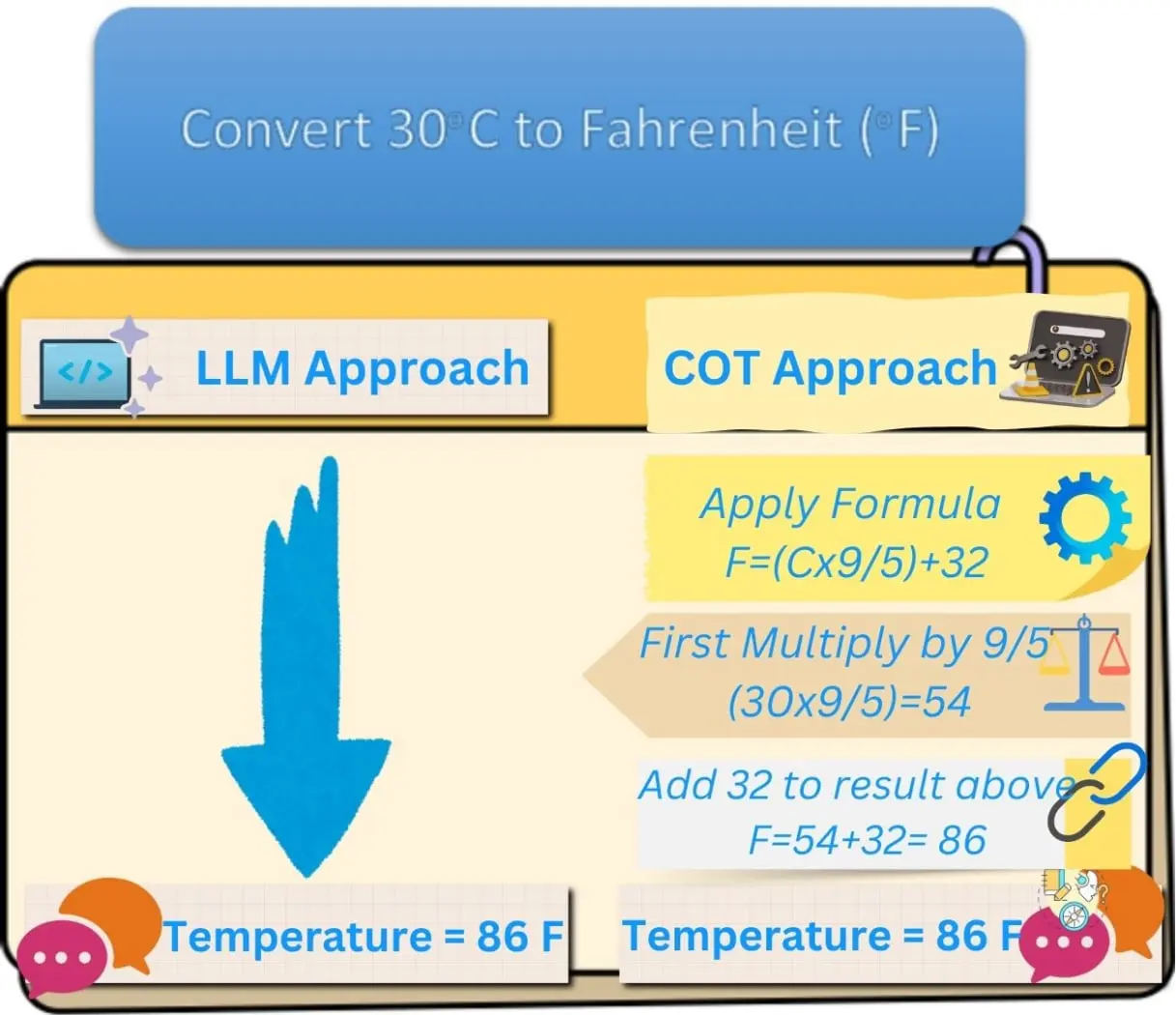
Chain-of-thought reasoning is a sequential process where a complicated task is broken down into a series of easier logical steps to reduce the complexity and enhance the performance. This kind of reasoning is similar to how humans approach complicated tasks with intermediate steps. Chain-of-thought reasoning has applications in explainable AI (XAI) to offer explanations for network predictions, which can be crucial for safety-related tasks such as Autonomous Driving.